



Next: Determination of the Contact Up: Contact Algorithms Previous: Contact Algorithms
Geometric analysis is performed over the coordinates and displacements of the contactor node and the target surface nodes to determine the following
- 1.
- The target element and its corner nodes i, j and k
- 2.
- The normal to the target surface that contains nodes i, j and k
- 3.
- The coordinates of the contactor node projection on the target element, point c'
- 4.
- The nondimensional triangular coordinates L1, L2 and L3 that describe the location of point c' inside the triangle of vertices i, j and k.
In order to find the potential target element, the projection of the contactor node c on each of the potential target elements is found. This projection is achieved in a closed form for a linear surface and by means of an elementary Newton scheme for a quadratic surface. In the latter case, there is an evident non-uniqueness problem due to the lack of convexity of the target surface. It is conceivable that there are three distinct projections to the target surface. To avoid such a problem, the closest point policy is proposed, see Figure (3.6).
Figure 3.6: Closest Point Projection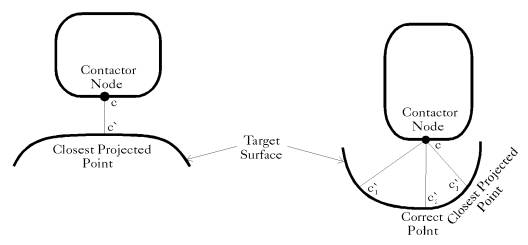 |
The algorithm used to perform the aforementioned tasks is summarized as follows
Loop (A) over the potential target elements
Loop (B) over the nodes on the target surface
Get the closest node and the attached elements
End loop (B)
End loop (A)
Loop (C) over the target elements attached to the closest node
Get the normal to the element
Get the contactor projection (point c')
Get L1, L2 and L3 for point c' with respect to nodes i, j and k
If point c' is between points i, j and k then
Return
End if
End loop (C)
No target element is found
Return
Next: Determination of the Contact Up: Contact Algorithms Previous: Contact Algorithms A. Zeiny
2000-09-06