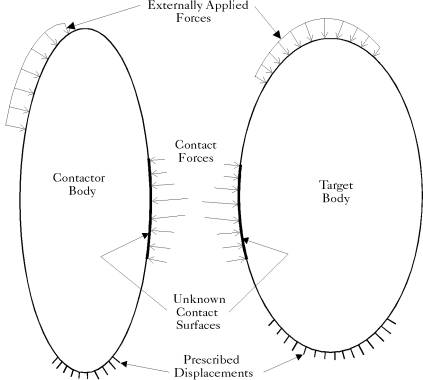
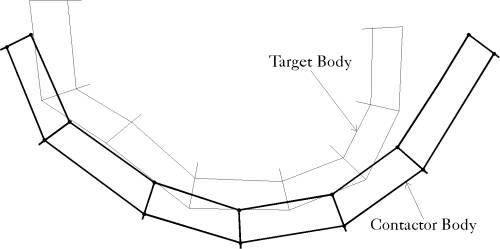
Figure (3.1) shows schematically the problem under consideration. Two generic bodies are shown and denoted as contactor and target. The contactor contains the finite element boundary nodes that comes into contact with the target elements. The target and contactor could be within a single body that folds during deformation in a fashion that invokes contact between parts of its boundaries, see Figure (3.2). The displacement compatibility between the two bodies requires that no material overlap can occur along the region of contact. As a result, contact forces are developed that act along the region of contact upon the target and the contactor. The force transmissibility condition requires that these forces to be equal and opposite. In addition, it requires that normal contact forces can only exert a compressive action, and the tangential contact forces have to satisfy a law of frictional resistance. Coulomb's law of friction is used in the current formulation to regulate the friction forces. It requires that the friction force has to be greater than ![]() for a slippage to occur. Once slippage has occurred, the friction force is set equal to
for a slippage to occur. Once slippage has occurred, the friction force is set equal to ![]() , where
, where ![]() and
and ![]() are the static and dynamic coefficients of friction, respectively. These two conditions impose inequality constraints on the system that mathematically represent the stress analysis model of the contact bodies. These constraints are given as
are the static and dynamic coefficients of friction, respectively. These two conditions impose inequality constraints on the system that mathematically represent the stress analysis model of the contact bodies. These constraints are given as